Katherine J. Kuchenbecker, Director of the Haptic Intelligence Department at the Max Planck Institute for Intelligent Systems
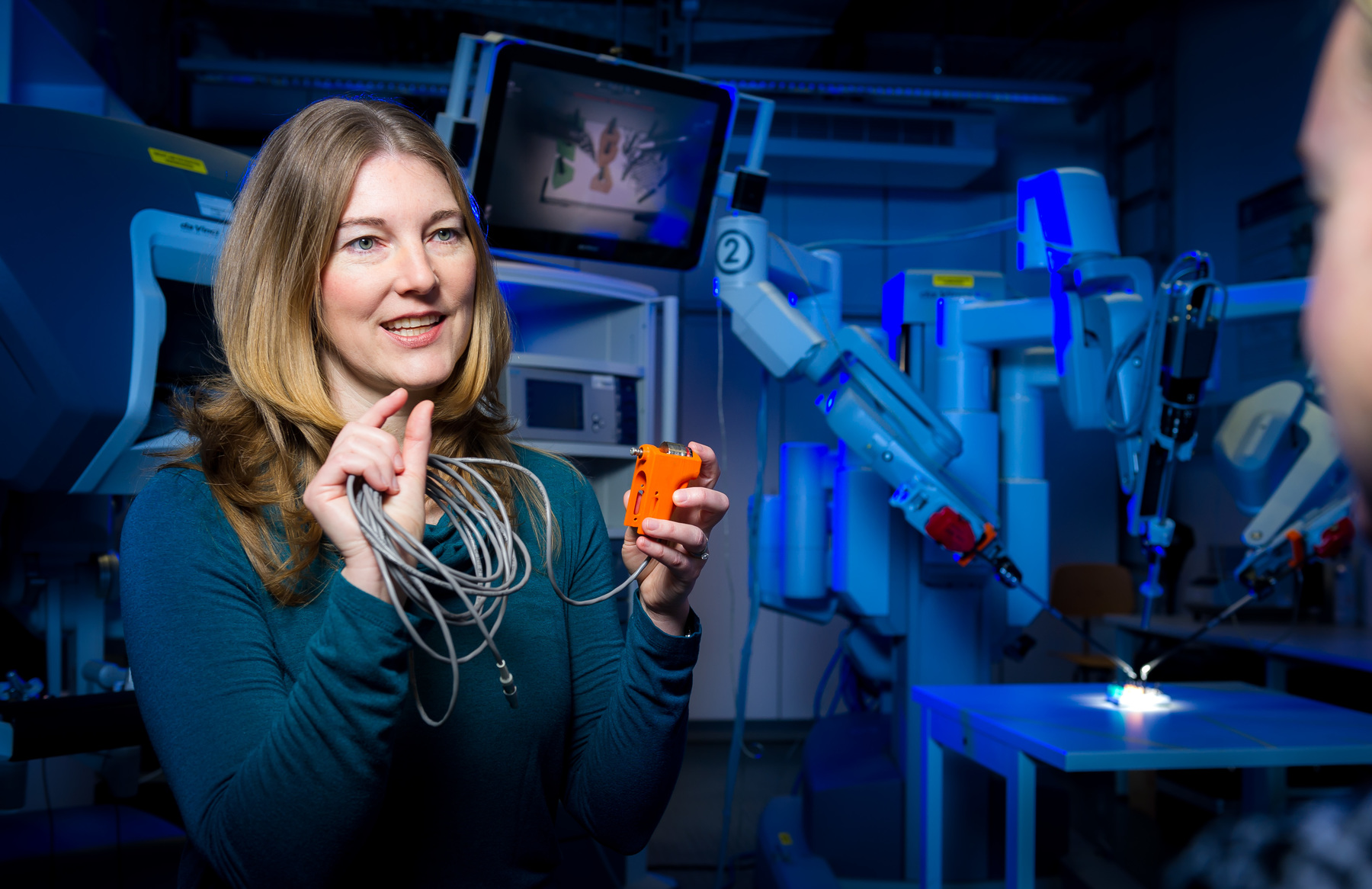
Das Bild zeigt Kuchenbecker neben einem Intuitive da Vinci Si, einem robotergestützten Operationssystem, mit dem ein/e Chirurg*in einen Patienten aus der Ferne operieren kann. Normalerweise führt der Arzt oder die Ärztin die Operation nur aufgrund dessen durch, was er oder sie sieht. Kuchenbecker und ihr Team haben den Roboter so erweitert, dass Chirurg*innen die Vibrationen der chirurgischen Instrumente spüren und so ihr wertvolles Fingerspitzengefühl einsetzen können. Die Erkenntnisse aus Forschungsprojekten im Zusammenhang mit dem da Vinci werden in die Arbeit des Exzellenzclusters "Integrative Computational Design and Construction for Architecture (IntCDC)" der Universität Stuttgart einfließen und selbstlernenden Konstruktionsroboter mit haptischem Feedback versehen, damit sie spüren können, was sie tun. Auf dem Bild spricht Kuchenbecker mit einer ihrer Doktorandinnen und erklärt, wie das von ihr miterfundene Gerät Verrotouch funktioniert, das ein Touch-Feedback gibt. Die Technologie misst die Vibrationen, die bei dem chirurgischen Eingriff verursacht werden, und leitet sie an ein haptisches Feedbacksystem am da Vinci weiter. Der Chirurg, der den Roboter steuert, erhält durch den Tastsinn wichtige Informationen. ********* The picture shows Kuchenbecker next to an Intuitive da Vinci Si, a robot-assisted surgical system with which a surgeon can operate on a patient from a distance. Normally, the physician conducts the operation based only on what he or she sees. Kuchenbecker and her team have augmented the robot in such a way that surgeons can feel the vibrations of the surgical instruments and thus employ their valuable fingertip sensitivity. The insights gained in research projects related to the da Vinci will be employed in the work of the “Integrative Computational Design and Construction for Architecture (IntCDC)“ Excellence Cluster of the University of Stuttgart, providing self-learning construction robots with haptic feedback, so they can feel what they are doing. In the image, Kuchenbecker is talking to one of her Ph.D. students explaining how the device she co-invented works that adds touch feedback to robotic surgery. It is called Verrotouch. The technology measures the vibrations caused by surgical tool contact during robotically assisted minimally invasive surgery and relays them to a haptic feedback system at the control console. The surgeon controlling the robot gains important information through the sense of touch.
Ⓒ Universität Stuttgart/M. Kovalenko
Cropped Images (thumbnails)